��������
��������
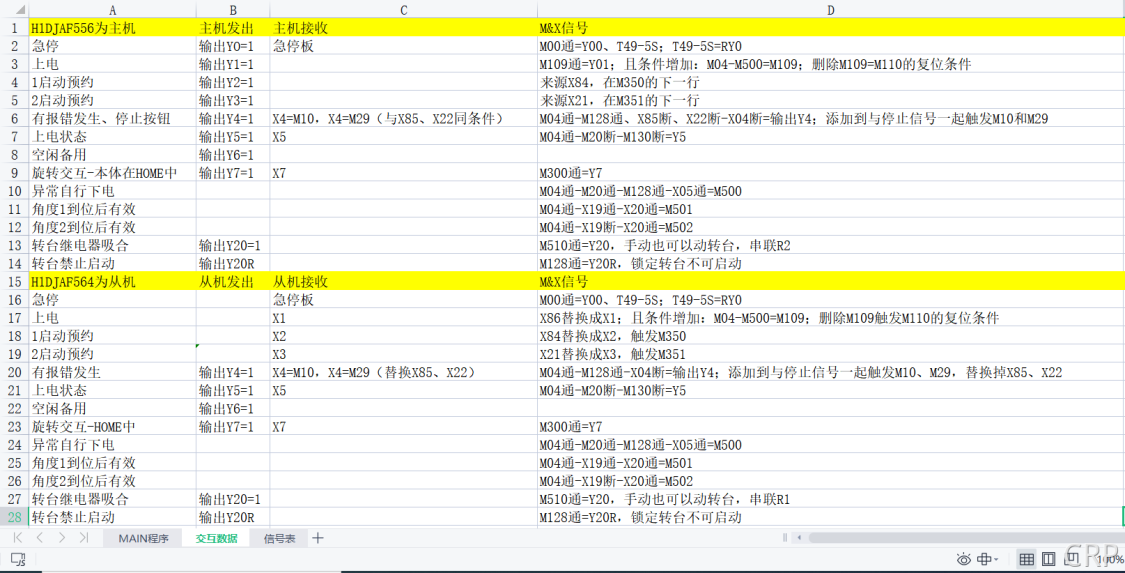
H1DJAF556����
M&X�ź�
��ͣ��
��ͣ
M00ͨY00,T49-5S:T49-5S-RYO
���YO-1
M109ͨ-Y01:������������:M04-M500-M109:ɾ��M109-M110�ġ̸�λ����
�ϵ�
���Y11
1����ԤԼ
��ԴX84,��M350����һ��
���Y2-1
��ԴX21,��M351����һ��
2����ԤԼ
���Y31
M04ͨ-W128ͨ,X85��,X22��-X04��һ���74:���ӵ���ֹͣ�ź�һ��M10��M29
�б�������,ֹͣ��ť
X4-M10,X4-M29(��X85,X22ͬ����)
���Y41
�ϵ�״̬
���Y5-1
M04ͨ-M20��-M130��Y5
X5
�����
���Y6-1
X7
���Y7-1
M300ͨY7
��ת����-������HOME��
M04ͨ-M20ͨ-M128ͨ-X05ͨ-M500
�쳣�����µ�
10��
11��
�Ƕ�1��λ���Ш�Ч
M04ͨ-X19ͨ-X20ͨM501
12�Ƕ�2��λ��С���Ч
M04ͨ-X19��-X20ͨM502
M510ͨ-Y20,�ֶ�Ҳ���Զ���ת̨,����R2
13ת̨�̵�������
���Y201
14ת̨��ֹ����
���Y20R
M128ͨY20R,����ת̨����������
15H1DJAF564Ϊ�ӻ�
�ӻ�����
M&X�ź�
�ӻ�����
��ͣ��
M00ͨY00,T49-5S:T49-5SRY0
16��ͣ
17�ϵ�
X86�滻��X1;���������μ�:M04-M500-M109:ɾ��M109����M110�ĸ�λ����
X1
181����ԤԼ
X2
X84�滻��X2,����M350
X21�滻��X3,����M351
192����ԤԼ
X3
M04ͨ-1128ͨ-X04�϶����Y4:���ӵ���ֹͣ�ź�һ��M10,M29,�滻��X85,X22
���Y4-1
X4M10,X4M29(�滻X85,X22)
20�������
�ϵ�״̬
���Y5-1
M04ͨ-M20��-M130��Y5
X5
22 �����
���Y6-1
���Y7-1
X7
M300ͨY7
23
��ת����-HOME��
24
M04ͨ-M20ͨ-M128ͨ-X05ͨ-M500
�쳣�����µ�
25�Ƕ�1��λ���Ц�Ч
M04ͨ-X19ͨ-X20ͨM501
26�Ƕ�2��λ����Ч
M04ͨ-X19��-X20ͨM502
27ת̨�̵�������
M510ͨY20,�ֶ�Ҳ���Զ�ת̨,����R1
���Y201
28
ת̨��ֹ����
M128ͨY20R,����ת̨��������
���Y20R
ʮ
�źű�
��������
MAIN����
100%